

:: Abstract
 This tutorial provides a hands-on introduction to ROS - Robotic Operating System - and its use for robot in-hand manipulation.
This tutorial provides a hands-on introduction to ROS - Robotic Operating System - and its use for robot in-hand manipulation.
ROS has been emerging as a standard for robot software development. It is an open-source, meta-operating system that provides hardware abstraction services. It implements low and high level functionality components addressing robot perception, control and planning, focusing on the modularity and reusability of code contributed by a growing user community.
ROS is designed to be as thin as possible, with no wrapping of user code so that it can be used with other robot software frameworks. The preferred development model is to have ROS independent libraries with clean interfaces. It is language independent, easy to use and scalable to large runtime systems and processes.
The speakers at the tutorial are researchers that are currently working on in-hand manipulation and using ROS for their work, providing practical case studies and examples, and bringing along some hardware to showcase and eventually test the attendees’ tutorial code.
As an outcome of this tutorial, attendees will have a basic knowledge on how to use ROS for manipulation, experience practical cases related with perception and action for robotic in-hand object manipulation, and also have a good insight on how ROS can be used as a software development tool in the context a of a robotics research team.
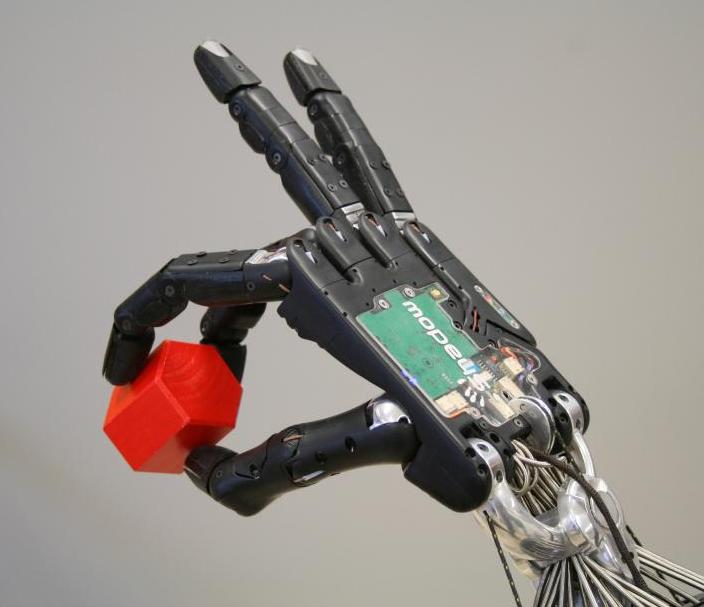
The speakers are currently using ROS for research and development on autonomy and dexterity with robot hands for manipulation and grasping. Many of those activities are supported by international projects (e.g. European project HANDLE - Developmental pathway towards autonomy and dexterity in robot in-hand). ROS was a natural choice for the integrated work in the robotic in-hand object manipulation system, integrating perception using the Kinect sensor and tactile sensing, and control of the robotic arm and the SHADOW robotic hand.
:: Organizers
- Jorge Dias, ISR - University of Coimbra (Contact person)
- Jorge Lobo, ISR - University of Coimbra
- Pedro Trindade, ISR - University of Coimbra
- Véronique Perdereau, Université Pierre et Marie Curie
:: Speakers
- Jorge Dias, ISR - University of Coimbra
- Jorge Lobo, ISR - University of Coimbra
- Véronique Perdereau, Université Pierre et Marie Curie
- Matei Ciocarlie, Willow Garage
- Sachin Chitta, Willow Garage
- Silvia Rodríguez-Jiménez, University Carlos III of Madrid
- João Bimbo, King’s College London
- Toni Oliver, Shadow Robot Company
- Pedro Trindade, ISR - University of Coimbra
- Mario Prats, University Jaume I
- Guillaume Walck, Université Pierre et Marie Curie
:: Schedule
| Time | Section Type | Title/Author |
| 08:30 - 09:00 | Technical | Solve basic technical problems. Please check beforehand the preparation section below. |
| 09:00 - 09:05 | Talk #1 | Jorge Dias / Jorge Lobo / Pedro Trindade / Véronique Perdereau Welcome Session |
| 09:05 - 09:30 | Talk #2 | Matei Ciocarlie / Sachin Chitta ROS Overview |
| 09:30 - 10:30 | Talk #3 | Matei Ciocarlie / Sachin Chitta Manipulation & Grasping - Part I |
| Coffee break | ||
| 11:00 - 12:00 | Talk #3 | Matei Ciocarlie / Sachin Chitta Manipulation & Grasping - Part II |
| 12:00 - 12:30 | Hands-on #1 | Silvia Rodríguez-Jiménez Visual Perception System within HANDLE EU project using ROS |
| Lunch | ||
| 14:00 - 14:30 | Hands-on #2 | João Bimbo Managing coordinate frames with ROS |
| 14:30 - 15:00 | Hands-on #3 | Toni Oliver Control of the Shadow Dexterous Hand using ROS |
| 15:00 - 15:30 | Hands-on #4 | Pedro Trindade Hand configuration perception with distributed sensors using ROS |
| 15:30 - 16:15 | Hands-on #5 | Mario Prats Grasp and Motion Planning with Underwater Intervention Vehicles running ROS: the experience of TRIDENT EU project |
| Coffee break | ||
| 16:45 - 17:30 | Hands-on #6 | Guillaume Walck Adapting the manipulation stack to in-hand manipulation |
| 17:30 - 17:45 | Closing | Jorge Dias / Jorge Lobo / Pedro Trindade / Véronique Perdereau Concluding remarks and Tutorial Closing |
| END | ||
:: Preparations
Since this is a hands-on tutorial, attendees should follow these guidelines before the start of the sections:
H1: Visual Perception System within HANDLE EU project using ROS
Please follow the instructions in H1-Preparation.pdf
H5: Grasp and Motion Planning with Underwater Intervention Vehicles running ROS: the experience of TRIDENT EU project
Please use this Packages rosinstall file:
https://uji-ros-pkg.googlecode.com/svn/iros2012_tutorial.rosinstall
:: Downloads
Please find below the necessary files for all the sections in this tutorial:
H1: Visual Perception System within HANDLE EU project using ROS
H2: Managing coordinate frames with ROS
H4: Hand configuration perception with distributed sensors using ROS
H5: Grasp and Motion Planning with Underwater Intervention Vehicles running ROS: the experience of TRIDENT EU project
:: Presentations
Please find below the presentations of this tutorial: