Cooperative Perception
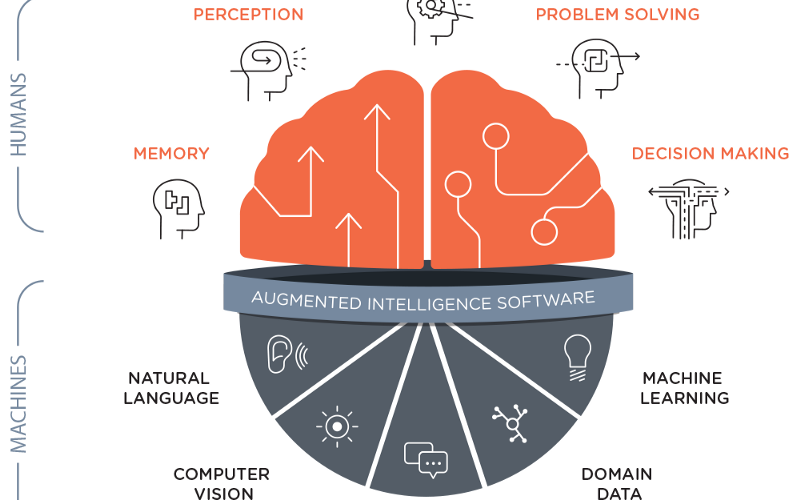
Artificial perception with teams of cooperative robots or large sensor networks makes it possible to perceive and act in wide areas (e.g. surveillance of buildings, disaster response, environmental monitoring, etc.), by taking advantage of the inherent parallelism and spatial distribution of those distributed systems. Moving from centralized to distributed artificial perception raises subsidiary research questions not found in monolithic systems, namely: the need to fuse multimodal sensory data in a common perception model (e.g. robotic map annotated with semantic information); the need for a knowledge sharing framework to make possible the exchange of information/knowledge between different intelligent nodes and humans in complex perception tasks where flexible and highly complex human perception should be complemented with machines’ higher precision and repeatability; and, in the case of multi-robot systems, cooperative active perception requiring coordination within and among robot teams, and between human and robot teams.
Lead Researcher

Related