Software
Here you can see a list of available software developed in the Artificial Perception for Intelligent Systems and Robotics team.
-
Speech Recognition Package for Social Robotic Platforms in ROS
Date: 2018-04-02
The Speech Recognition Package (speech_recog_uc) is a ROS (Robot Operative System) package designed by Universidade de Coimbra, that allow robots to perform high-reliability real-time speech recognition based on a real-time Voice Activity Detection algorithm, with high efficiency and low computational resources consumption.
Maintainer: J. Pedro Oliveira
-
aPOMDP: User-Adaptive Decision-Making for Social Robots
Date: 2017-10-24
aPOMDP is a decision-making technique for user-adaptive robots based on a novel rewarding scheme and learning mechanism, implemented on JuliaPOMDP and Python.
Maintainer: Gonçalo S. Martins
-
BUM_ROS: A Bayesian User Model Implemented in ROS
Date: 2017-09-25
BUM_ROS is a user modelling technique developed in ROS, Python and ProBT, allowing for the integration of heterogeneous user evidence in a distributed manner.
Maintainer: Gonçalo S. Martins
-
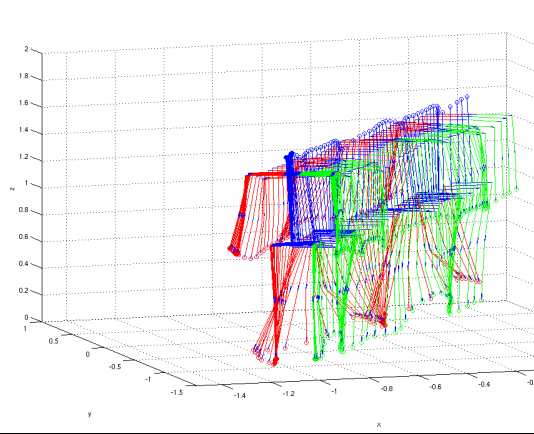
Stereo Laser Range Finder Calibration Toolbox (SLaRF)
Date: 2011-12-29
SLaRF is a calibration toolbox to estimate the extrinsic parameters among a Laser Range finder (LRF) and an stereo camera.
Maintainer: Hadi Aliakbarpour
-
Inertial Measurement Unit and Camera Calibration Toolbox
Date: 2008-06-27
InerVis Toolbox for Matlab is a calibration toolbox developed in MatLab to perform Relative Pose Calibration between Visual and Inertial Sensors.
Maintainer: Doctor Jorge Lobo
Related