Announcement
Toggle navigation
AP4ISR
Research Activities
Projects
Research Results
Outreach Activities
Facilities
Contacts
Home
Thesis
Thesis
PhD Projects
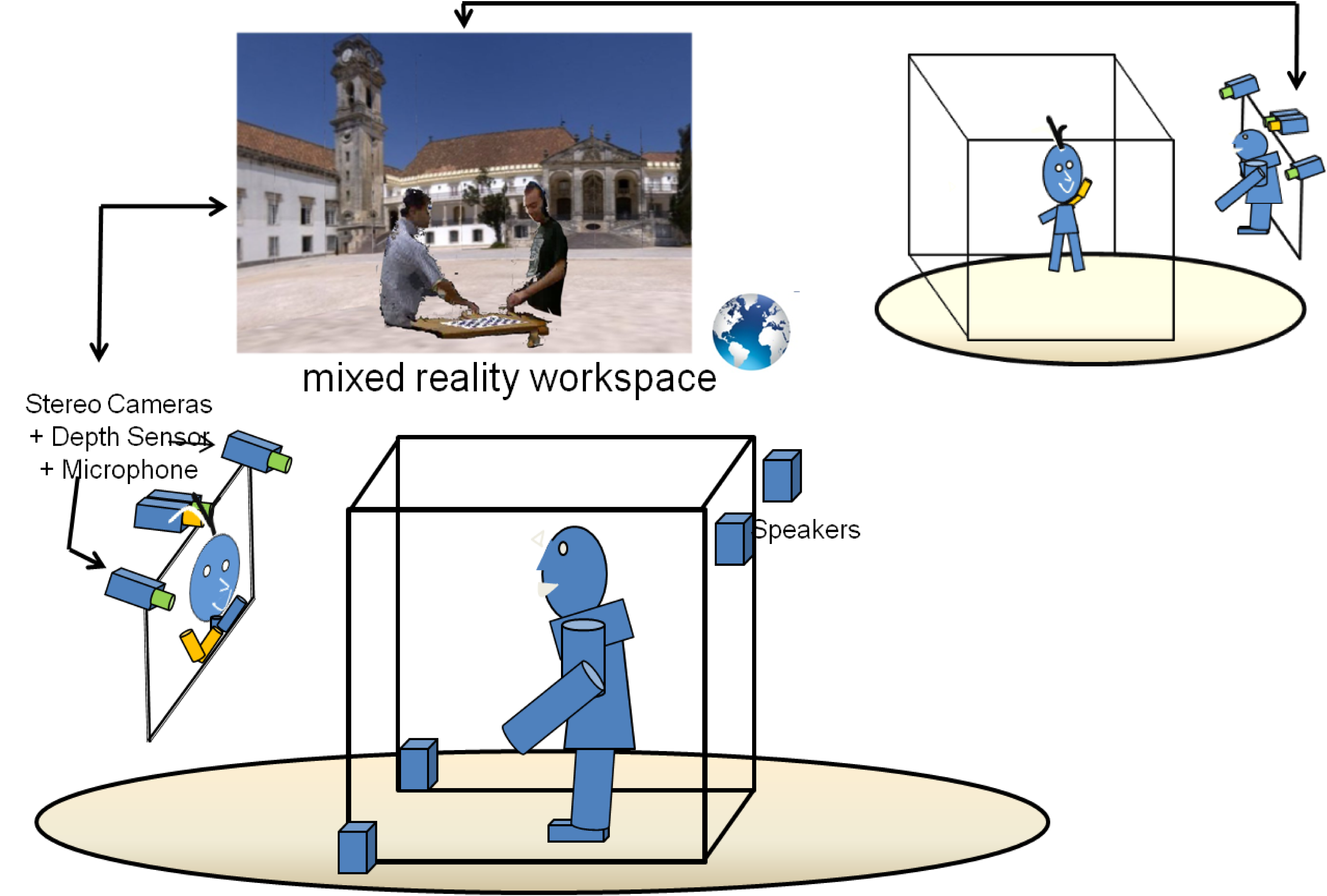
Augmented reality framework for socialization between elderly people
Multi-Agent Cooperation Over Unreliable Mobile Ad Hoc Communication Networks – Behavior-Based Collective Architectures with Communication Constraints
Robot Instruction through Bayesian Approaches to Laban-based Manipulative Action Characterization
Effective Cooperation and Scalability in Multi-Robot Teams for Automatic Patrolling and Inspection of Infrastructures
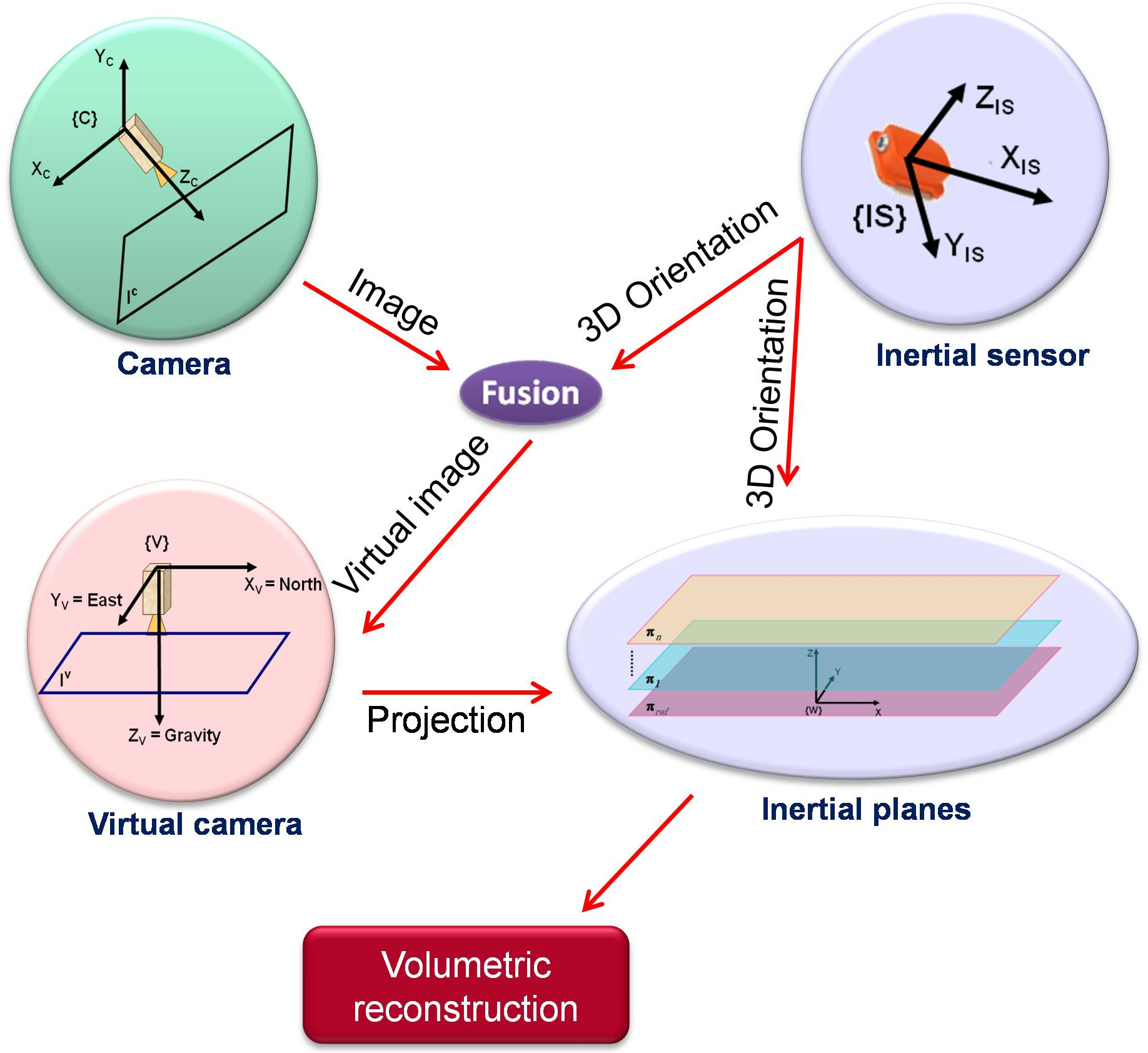
Exploiting Inertial Planes for Multi-sensor 3D Data Registration
Probabilistic LMA-based Human behaviour Understanding by Conjugation of Frequency and Spatial Domains
Visuo-Auditory Multimodal Emotional Structure to Improve Human-Robot-Interaction
Development of Techniques for Multimodal Object Exploration
Bayesian approaches to human motion characterization and synthesis based on Laban Movement Analysis
Bayesian Realtime Perception Algorithms on GPU
Bayesian Cognitive Models for 3D Structure and Motion Multimodal Perception
Multi-Cue Visual Tracking for Human-Robot Interaction
Robot Learning by Imitation: Haptic and Visual Sensing
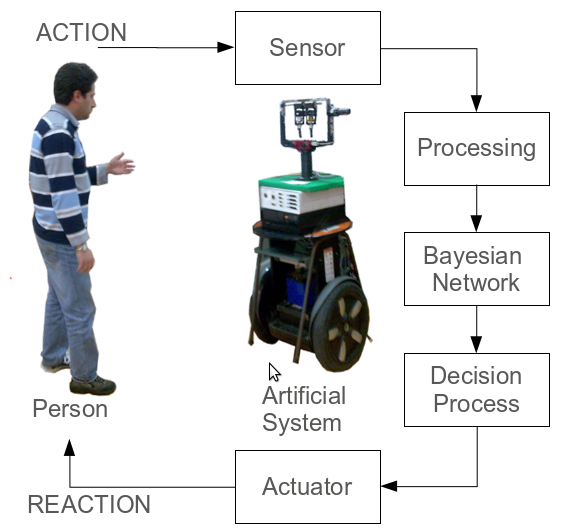
Human-Robot Interface Using Laban Movement Analysis Inside the Bayesian Framework
Autonomous Navigation and Multi-Sensorial Perception and Real-Time Localization for a Mobile Robot (Navegação Autónoma e Localização em Tempo Real para um Robot Móvel com Percepção Multi-sensorial)
Integraton of Vision and Inertial Sensing
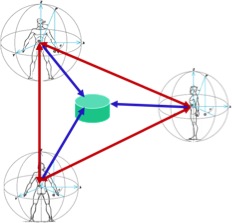
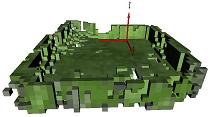
Building volumetric maps with cooperative mobile robots and useful information sharing: a distributed control approach based on entropy
Multimodal mapping of the human eye (Mapeamento Multimodal da Mácula do Olho Humano)
MSc Projects
Non-standard and cheap inerfaces for software applications
Analysis of user concentration during interaction
Head and gaze tracking
ArdVP: Arduino Programming using Block Diagrams in Matlab / Simulink
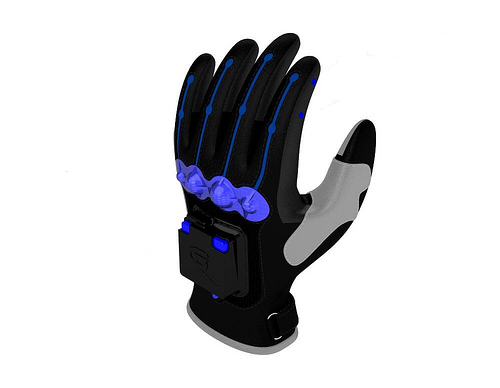
InerTouchHand – Hand device with distributed inertial sensors and touch vibro-tactile feedback
Wireless Teams – Comparison of Wireless Tecnologies for Communication in Mobile Robotics Teams
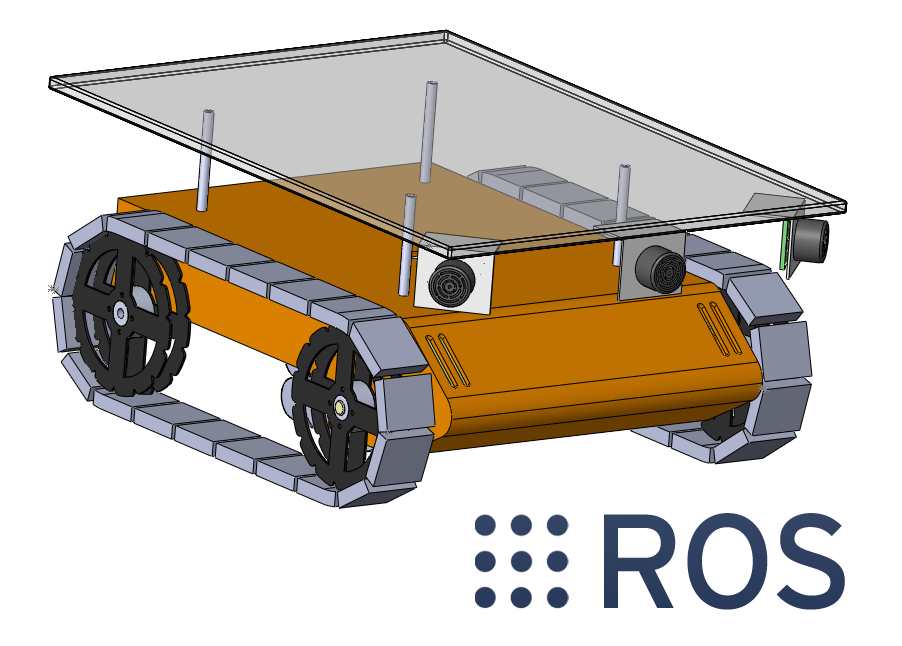
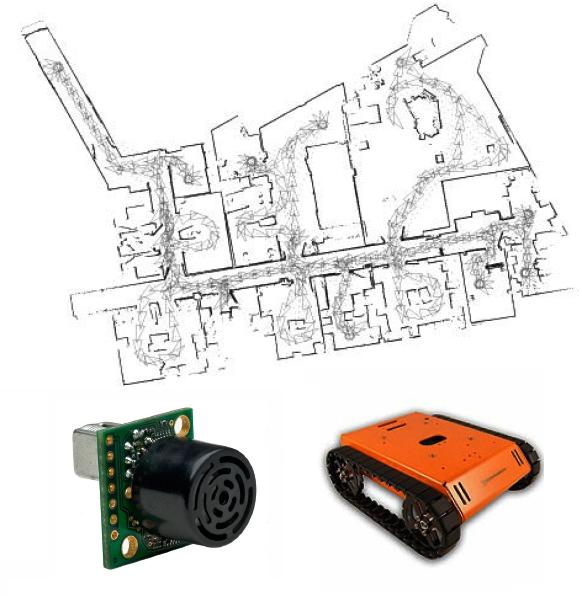
ROSint: Control and integration of a mobile robot in ROS architecture
SoLoc: Robust Localization in Multi-Robot Teams
Aplicações baseadas na Combinação de Informação fornecida por Sensores Inerciais e Imagens
Técnicas de Visão Aplicadas à Navegação em Robótica Móvel
Reconstrução tridimensional utilizando luz estruturada
Integration of inertial information on an active vision system (Integração de informação inercial num sistema de visão activa)
Image recognition using geometrical invariants (Reconhecimento de Imagem Utilizando Invariantes Geométricos)
Inertial Sensor Data Integration in Computer Vision Systems
TELE 3D – A scanner for 3-D registration of objects (TELE3D – Um Scanner para Registo Tridimensional de Objectos)
CyberNav – Navigation system for mobile vehicles (CyberNav – Sistema de Navegação para Veículos Móveis)
3-D reconstruction using microvergence (Reconstrução tridimensional utilizando micro-vergência)
Mobile robots navigation (Navegação de Robôs Móveis)
Fixação Visual – Uma Abordagem Computacional
Next »
« Previous
Related
Publications
Software
Databases